開発実績
ロボット開発
2015.12.17
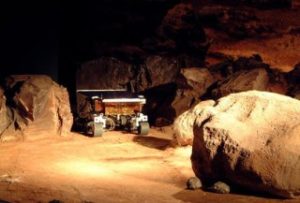
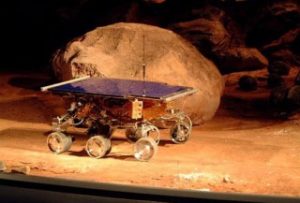
ロボット開発 研究 製作事例 火星探査ロボット「マーズローバー」124日間無人運転

【お客様】北九州博覧祭
【場 所】北九州市博覧祭
【仕 様】自動運転ロボット 製作・・・各種センサーの有効活用によって実現しました。CCDによる画像認識、赤外線センサー、超音波センサー、ドップラーセンサー、メカニカルセンサーなどを組み込み場所によって使い分けて完成しました。
自動運転ロボット 製作・・・各種センサーの有効活用によって実現しました。CCDによる画像認識、赤外線センサー、超音波センサー、ドップラーセンサー、メカニカルセンサーなどを組み込み場所によって使い分けて完成しました。
自動運転システム開発で重要な要素として、センサーにより位置判定情報とモーター駆動装置の連携に時間をかけました。
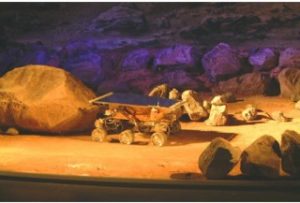
1周30mの舞台中央の大岩の地質調査を行うため、大岩に最大で1cmまで接近できます。
地質調査後バックヤードの自動充電装置で充電を行い次回のショー(1時間後)に備えてスタート位置でスタンバイしています。これらの演出をすべて無人で124日間を乗り切りました。
CCDカメラによる画像解析によって位置情報認識での自動運転が照明器具によってほとんど役に立たなかった点が予想外の展開でCCDカメラによる情報を補助的に活用し赤外線センサーと超音波センサーの情報をメインにするシステム変更を現場で対応しシステムを完成させました。


-
ROBOTS
ロボット開発ロボット開発
産業用ロボット、大型ロボット、小型ロボット、ロボットコントローラー、ロボット制御装置など ロボット開発に必要な最新技術を持って、お客さまの「夢」を実現させます。
-
INSPECTION
検査装置検査装置
質を落とさず作業効率を上げること、「全員が意識すれば」「ルール化すれば」など、人に依存したお約束はなかなか続きません。
だから機械に頼れるなら頼ってみようと思えませんか?
澤電子ならそういった観点から装置の製作のアドバイスもさせていただきます。
-
EFFECT DEVICE
演出装置演出装置
澤電子では主にLEDやロボットを用いた演出装置の製作を得意としています。
「こんなことを実現させたい」という想い持った方のお手伝いができるように日々技術力を磨いております。
もちろん既存の装置の改良なども承ります。
-
CONTROL DEVICE
制御装置制御装置
様々な機械に使用されている制御装置全般を開発します。
遠隔制御装置や自動制御など様々な分野の制御装置を扱えます。